安川电机
-
我的大学毕设:柔性双机械臂平台
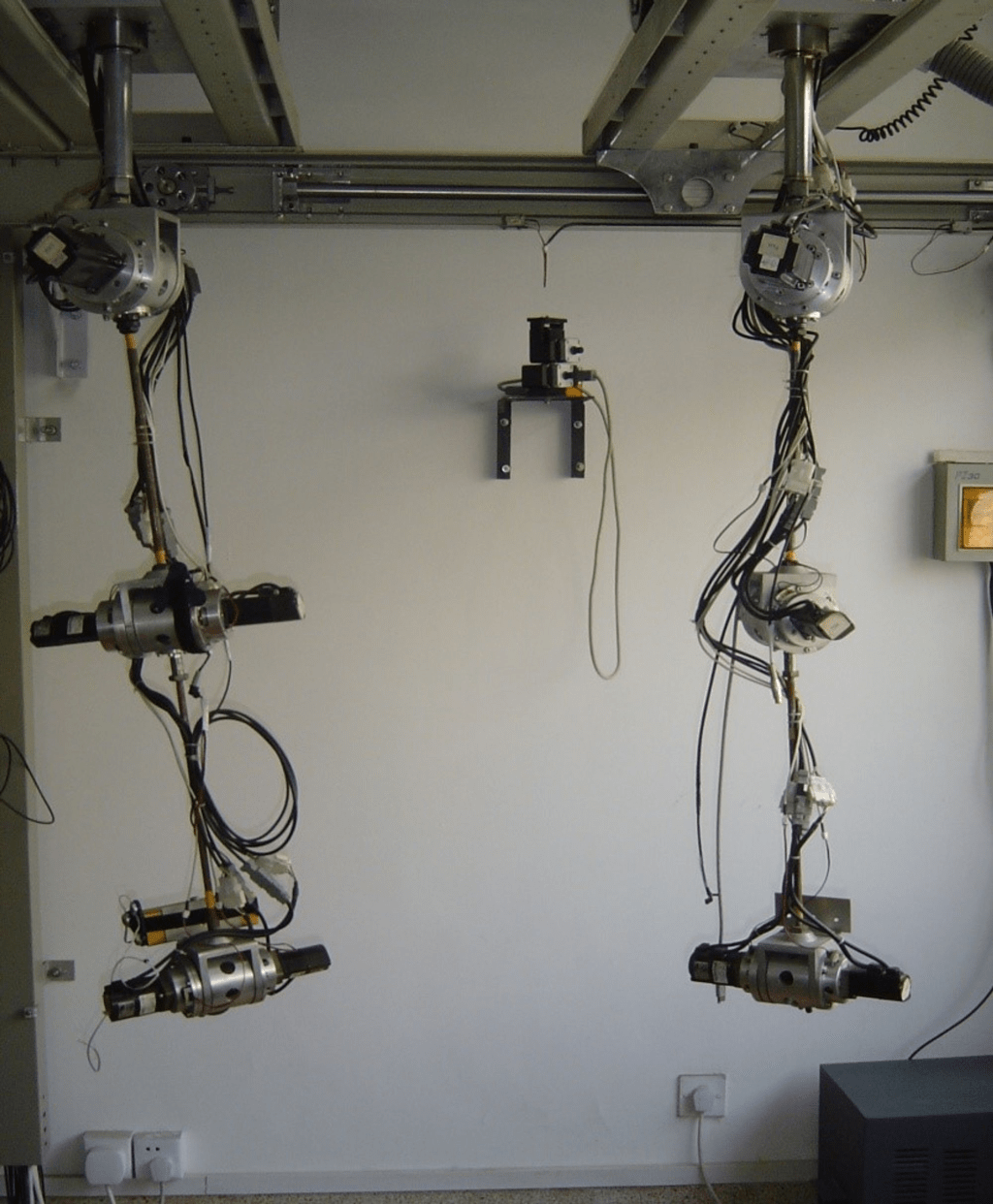
在大学时代,人们称我为“机器人男孩”。现介绍我多年前的大学毕设项目:柔性双机械臂平台。该平台以轻量级架构和高负载/重量比为特点,是现代高技术行业的宝贵补充。主要目标是建立基于PCI-8136多功能输入/输出运动控制卡的机械臂伺服控制系统硬件平台,并在网络通信条件下创建实时数据通信接口。伺服控制系统包括理解原理和应用、测试伺服电机、设置参数,并最终完成整个硬件连接。控制软件基于PCI-8136多功能输入/输出卡,实现了控制多个电机位置的联动模式。柔性机械臂由两个组成,每个有四个关节,悬挂在矩形框架轨道上,一个在Y轴移动,另一个在X-Y轴移动。 Continue reading
关于我
大家好,我是赛博红兔,是一个具有超过6年在Yaskawa Motoman机器人实验室和工业过程控制研究所的机器人及控制研究经验的创新且敬业的专业人士。主要关注机器学习、先进动态系统控制算法及其实现,精通C++、Python和MATLAB编程。
咨询互动邮箱:cyberhongtu@outlook.com
Bilibili视频请搜索:赛博红兔CyberHongTu
日志分类
- 生活琐事 (1)
- 生产力和技术 (1)
- 科技新闻评论 (1)
- Python教程《Python5分钟》 (14)
- Python教程《和我一起玩3A游戏》 (7)
- Python教程《和我一起玩Python》 (52)
- 播客《和大伙聊聊天》 (11)
- 书籍读后感 (3)