在我的大学年代,我被人叫作“机器人男孩”。我很高兴借此机会介绍我多年前的一个大学毕设项目:柔性双机械臂平台。
简介
柔性机械臂代表了新一代机器人,它以轻量级架构和高负载/重量比为特点,使其成为现代工业、军事和航天应用等高技术行业的宝贵补充。
主要目标
主要目标是建立一个基于PCI-8136多功能输入/输出运动控制卡控制软件的灵活机械臂伺服控制系统硬件平台。这涉及比较臂部运动控制的终点位置和轨迹与位置测量仪器,并为网络通信条件下的双机械臂创建实时数据通信接口。

柔性机械臂伺服控制系统的硬件平台包括理解伺服控制系统的原理和应用,测试每个伺服电机,设置伺服驱动器的参数,理解信号连接电路板、控制柜和PCI-8136控制卡的接线,最后完成整个机械臂伺服控制系统的硬件连接并排除任何错误或设备损坏。
控制软件基于PCI-8136多功能输入/输出卡,它使得实现控制多个电机位置的联动模式成为可能。它还为网络通信条件下的双机械臂创建实时数据通信接口。
柔性机械臂的基本结构
柔性机械臂的伺服控制系统是基于原始设计开发的,由两个柔性机械臂组成,每个都有四个关节(肩部、臂关节、肘部和腕部)。肩关节负责机械臂在水平面上的旋转。两个机械臂悬挂在2×1.7米的矩形框架轨道上,一个在Y轴移动,另一个在X-Y轴移动。
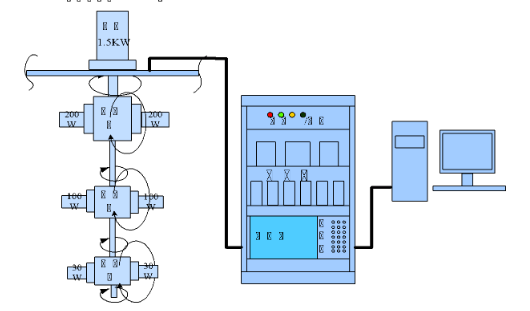
| 型号/规格 | 数量 | 描述 |
| 30W | 4 | 腕部 |
| 100W | 4 | 肘部 |
| 200W | 4 | 臂关节 |
| 1KW | 3 | 框架轨道 |
| 1.5KW | 2 | 颈部 |
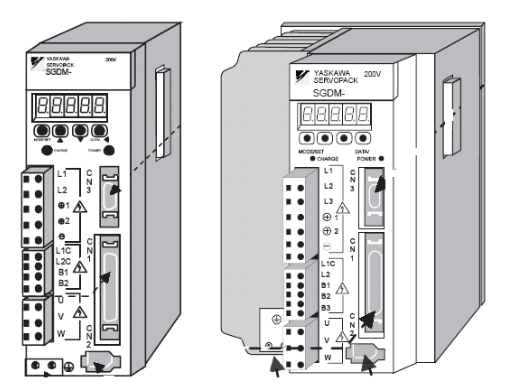
伺服控制器
对于这个设计,使用的伺服电机来自安川公司,每个关节使用不同功率和型号的伺服电机。信号线连接使用位置控制方法完成。
PCI-8136多功能输入/输出卡
对于这个项目,购买的运动控制卡是PCI-8136多功能输入/输出卡,它可以通过其6轴通道向伺服发送脉冲信号命令。

软件的目的
(1) 初始化每个机械臂关节的位置;
(2) 手动控制每个机械臂的关节;
(3) 构建多电机自动控制的联动模式;
(4) 构建报警监控系统;
(5) 设计网络通信下灵活臂。
运动演示
这个演示中的UI是用中文编写的。

Leave a comment